robot end effector pdf
A perspective view of the experimental proto-type end-effector that has the basic functional charac-. Basic grasping end effector forms are referred to as grippers.

Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot
The effects might be classified into three categories.

. End-effector sensing on the robot structure and its control. Purpose robotic end-effectors that can grasp only sacks and bags securely. Have students think of a job that an end effector could do and design an end effector for the job.
The end effector in this case should hold a drill as well as a sensor. Each sub-assembly performs a unique task essential to the performance of the system. This does not refer to the wheels of a mobile robot nor the feet of a humanoid robot which are not end-effectors because they are part of the robots mobility.
Grippers to grasp and manipulate objects eg parts during work cycle Tools to perform a. ONCE end effector Clamp Axis. Be able to compute the load.
This activity demonstates how an end effector is constructed to resemble a human hand. The RMSs end effector is a snare device that closes around special posts called grapple fixtures. Basic Principle Figures 2A 2B and 2C depict the basic architecture of the grasping mechanism of the end-effector that is used to.
Experiment shows that this end effector can perform the task of cutting and smashing branches within 1 cm. Hall University of Cincinnati 5. However a robot arm alone can hardly accomplish any job.
Aside from the robot itself the most critical device in a robotic automation system is the end effector. When referring to robotic end. End effectors are.
The end effector on the space shuttles robotic arm uses a pattern of wires which close like the aperture of a camera around a handle or other grasping point. The gripping device is called an end effector. Keywords - pruning robot end effector robot I.
Whatever the cause the consequences involve possible damage to the end effector or maybe even the robot itself. Robot Trajectory Optimization for the Relaxed End-Effector Path Sergey Alatartsev Anton Belov Mykhaylo Nykolaychuk and Frank Ortmeier Chair of Software Engineering Otto-von-Guericke University Universitatsplatz 2 Magdeburg Germany sergeyalatartsev mykhaylonykolaychuk frankortmeierovgude antonbelovstovgude Keywords. Overload Protection When some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor.
In a wider sense an end effector is the part of a robot that interacts with the work environment. ONCE end effector Figure 3. 11 for the identification of unstructured parts and anonymous environment in industrial robot.
INTRODUCTION Pruning is a cultivation technology that has great influence on the size flowering and production of fruit trees 1-3. A robotic end-effector integrated with multiple sensors was developed by O. September 24th 2018.
In this eBook you will find information on the different end effectors available on the market. This is why each manufacturing robot needs an end effector. The end-effector may be holding a tool or the end-effector itself may be a tool.
End effectors may consist of a gripper or a tool. The robot uses the end-effector to accomplish a task. The grapple fixtures are attached to the objects the RMS is trying to grasp.
ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3. Robots end effector could be a scalpel or others tools used in surgery. The task was to design an end effector.
Acces PDF Design Of A Robotic Arm With Gripper End Effector For coverage of fundamental topics like kinematics and trajectory planning and related technological aspects including actuators and sensors. End effectors can be part of the robots integral design or added-on to the base robot. The end-effectors described here cannot grasp boxes or any other objects.
This activity demonstates how an end effector is constructed to resemble a human hand. End effector 5 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a specific task. Manipulator electronic hardware and software.
Appropriate end effector for. The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot. Spray painting nozzle 3.
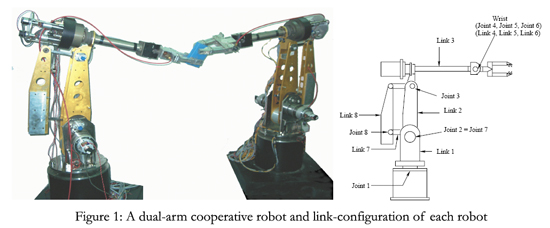
A refined prototype of the end-effector was indoor tested on a robotic platform with a computer-controlled three-degree-of-freedom manipulator. From the perspective of assisting just two dof of the human limb AREBOs self-aligning passive joints remove the need for active alignment thus simplifying the control of the human-robot interaction. The end-effector design of the robots structure allows it to be used for both the left and right arms without any change in its structure.
To impart practical skill examples and case studies are carefully worked out and interwoven through the text with frequent resort to simulation. A typical payload-to-weight ratio of a robot arm is about 120. An end effector is a kind of tool holder which is placed at the end of a robot.
Spot welding tools 2. In the strict definition which originates from serial robotic manipulators the end effector means the last link or end of the robot. The end-effector could pick 66-85 of the seed cotton from a boll with a picking time of 4 s for a simple and less efficient system to 18 s for a controlled-movement and more efficient system.
It is assumed that the sensor can detect the end-effector location and can guide it to the required location. References 6 and 7 describe other architectures with details. That means it is located at the end of the arm and it has an effect such as grasping on objects within its reach.
The end-effector may be holding a tool or the end-effector itself may be a tool. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. Motion of the robot end-effector.
Other possible end effectors are machine tools like a drill or milling cutters. Unilateral vs Multilateral Gripper Unilateral only one point or surface is touching the object to be handled. Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool.
The exact nature of this device depends on the application of the robot. End effector motion is controlled by a Fanuc 18i series CNC. By definition an end effector is the device at the end of a robotic arm that allows it to interact with its environment.
Powered by four low-power motors to cut with its blade saw. Tools as end effectors In robot applications the most commonly used three tools as end effectors are listed below. 10182015 C 2001 Ernest L.
These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability. Designs for end effectors are as numerous as the applications employing robots. Grabbed by the rollers will come out of end-effector and the sack will be released.
Of course an alternative means to release the sack material from the end-effector is to sepa-rate the rollers from one another G G G H G Figure 3. Base that attaches to the robot the clamp axis the shuttle axis the frame and pressure foot the nosepieces and the process tools. Have students think of a job that an end effector could do and design an end effector for the job.
The robot uses the end-effector to accomplish a task.

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
2

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

Pdf Robotics 1 Lecture 7 End Effectors
A Dual Arm Cooperative Robot

Pdf Robot End Effector Sensing With Position Sensitive Detector And Inertial Sensors Semantic Scholar

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Robot End Effector Pdf Manufactured Goods Machines

Robot End Effector Pdf Manufactured Goods Machines

Robot End Effector Definition And Examples

Robot End Effector Definition And Examples

Pdf A Double Claw Robotic End Effector Design Semantic Scholar

Robot End Effector Market Type Robot Type Application 2021 2030

Practical Use Of End Effectors Onrobot

Pdf Comparison Of Exoskeleton Robots And End Effector Robots On Training Methods And Gait Biomechanics Semantic Scholar

Multi Function End Effector Comau Pdf Catalogs Technical Documentation Brochure
Pdf Design Of A Robotic Arm With Gripper End Effector For Spot Welding Semantic Scholar

Robot End Effector Wikiwand

Jrm Vol 27 P 496 2015 Fuji Technology Press Academic Journal Publisher